|
|
| |
|
| ||
|
|
| |
|
| ||
Ce paragraphe est appliquable aux courbes paramétrées de l'espace.
Définition : Soit ![]() un arc paramétré du plan, ou de l'espace, tel que :
un arc paramétré du plan, ou de l'espace, tel que : ![]() a pour coodonnées
a pour coodonnées ![\begin{displaymath}\left( \begin{array}[c]{c} x\left( t\right) \\ y\left( t\right) \end{array} \right) \end{displaymath}](img7.png) ou
ou ![\begin{displaymath}\left( \begin{array}[c]{c} x\left( t\right) \\ y\left( t\right) \\ z\left( t\right) \end{array} \right) \end{displaymath}](img8.png) avec
avec ![]() ,
, ![]() ,
, ![]() de classe
de classe ![]() sur
sur ![]() un intervalle de
un intervalle de ![]() .
.
La longueur de ![]() entre
entre ![]() et
et![]() est selon les cas :
est selon les cas :
|
|
|
|
|
|
Théorème : Dans le cas d'une courbe plane définié en coordonnées polaires, la longueur de ![]() entre
entre ![]() et
et ![]() est :
est :

Preuve. On a vu que ![]() ce qui fournit immédiatement sa norme.
ce qui fournit immédiatement sa norme. ![]()
Définition : ![]() un arc paramétré du plan ou de l'espace, de classe
un arc paramétré du plan ou de l'espace, de classe ![]() sur
sur ![]() .
.
On appelle abscisse curviligne de ![]() dans le sens des
dans le sens des ![]()
![]() croissants et d'origine
croissants et d'origine ![]()
![]() , selon les cas :
, selon les cas :
|
|
|
|
|
|
On a alors
 ou
ou 
ou encore, toujours selon les cas :
|
|
|
|
|
|
Définition : ![]() un arc paramétré du plan, de classe
un arc paramétré du plan, de classe ![]() sur
sur ![]() .
.![]() un point régulier de
un point régulier de ![]() .
.![]() est lerepère de Frenet au point
est lerepère de Frenet au point ![]() avec
avec
|
|
|
| et |
|

Définition : Quand ![]() est paramétré par
est paramétré par ![]() une abscisse curviligne, on dit que le paramétrage est normal.
une abscisse curviligne, on dit que le paramétrage est normal.
Théorème : ![]() un arc paramétré du plan, de classe
un arc paramétré du plan, de classe ![]() sur
sur ![]() . Alors
. Alors ![]() est colinéaire à
est colinéaire à![]() .
.
Preuve. On a ![]() , d'où, en dérivant,
, d'où, en dérivant, , ce qui entraine
, ce qui entraine ![]() normal à
normal à![]() , donc colinéaire à
, donc colinéaire à ![]() .
. ![]()
Remarque : On a ici une différence avec les conventions des physiciens.
Pour nous, ![]() est toujours direct, tandis que pour les physiciens,
est toujours direct, tandis que pour les physiciens, ![]() dépend de la concavité, c'est à dire du fait qu'on tourne sur la gauche ou sur la droite.
dépend de la concavité, c'est à dire du fait qu'on tourne sur la gauche ou sur la droite.
Il est ainsi toujours tourné vers l'intérieur de la courbe.
Définition : Le rayon de courbure ![]() , la courbure
, la courbure ![]() en un point sont donnés par
en un point sont donnés par

C'est la première formule de Frenet.
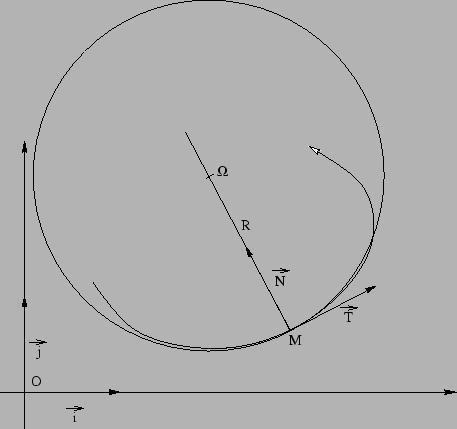
Définition : Le centre de courbure ![]() est
est
![]()
![]()
Le cercle de courbure ou cercle osculateur est le cercle de centre ![]() et de rayon
et de rayon ![]() .
.
C'est le cercle le « mieux » tangent à la courbe au point ![]() .
.
On regardera avec soin la figure ci-dessous.
Théorème : On a aussi

C'est la deuxième formule de Frenet.
Preuve.![]() , qu'on dérive
, qu'on dérive . D'où
. D'où![]() est colinéaire à
est colinéaire à ![]() . De plus,
. De plus, ![]() , qu'on dérive aussi,
, qu'on dérive aussi,  .
.
Mais  . On a donc
. On a donc  et enfin
et enfin  .
. ![]()
Remarque : Si ![]() , on tourne à gauche et si
, on tourne à gauche et si ![]() , on tourne à droite. (la convention est différente de celle des physiciens pour lesquels
, on tourne à droite. (la convention est différente de celle des physiciens pour lesquels ![]() est le rayon de courbure géométrique c'est à dire qu'on a toujours
est le rayon de courbure géométrique c'est à dire qu'on a toujours![]() )
)
On considère la fonction anglaire associée ![]() qui est l'angle entre
qui est l'angle entre ![]() et
et ![]() ,
, d'où, en paramétriques :
d'où, en paramétriques :

En polaires, on a :
![]()
Théorème : Avec les notations précédentes, on a

Preuve.![\begin{displaymath}\overrightarrow{T}:\left( \begin{array}[c]{c} \cos\varphi\\ \sin\varphi \end{array} \right) \end{displaymath}](img291.png) qu'on dérive par rapport à
qu'on dérive par rapport à ![]() . D'où
. D'où  .
.
Ce qui donne immédiatement  .
. ![]()
On remarque que dans tous les cas, on a besoin de ![]() ou de
ou de ![]() .
.

Expression que l'on simplifie avant de dériver![]() :
:
|
|
|
|
|
|
Alors, on calcule facilement

|
|
|
|
|
|
Ce qui permet de calculer :

Exemple : On va chercher le rayon de courbure en tous points de la courbe de représentation paramétrique :![\begin{displaymath}\left\{ \begin{array}[c]{l} x=\left( 1+\cos^{2}t\right) \sin t\\ y=\sin^{2}t\cos t \end{array} \right. \end{displaymath}](img311.png) .
.
On obtient facilement ![\begin{displaymath}:\left\{ \begin{array}[c]{l} x^{\prime}=\left( 3\cos^{2}t-1... ...\prime}=\sin t\left( 3\cos^{2}t-1\right) \end{array} \right. \end{displaymath}](img312.png) d'où
d'où  et
et![]() ce qui donne
ce qui donne  .
.
Enfin, 
On peut continuer le calcul et on obtient : ![]() signe
signe![$ (3\cos ^2t-1) \left( \begin{array}[c]{c} \cos t\\ \sin t \end{array} \right)$](img318.png) , puis :
, puis : ![]() signe
signe![$ (3\cos ^2t-1) \left( \begin{array}[c]{c} -\sin t\\ \cos t \end{array} \right)$](img320.png) .
.
Les coordonnées du centre de courbure sont donc : ![\begin{displaymath}\left\{ \begin{array}[c]{l} x=2\sin^{3}t\\ y=2\cos^{3}t \end{array} \right. \end{displaymath}](img321.png) .
.
Exemple : On va chercher le rayon de courbure en tous points de la courbe d'équation![]() en coordonnées polaires.
en coordonnées polaires.
On a déjà calculé  et ainsi
et ainsi puis
puis  .
.![]() qui donne
qui donne  .
.
Enfin,  .
.
On peut aussi rechercher, si on aime les calculs, des formules directes donnant courbure et rayon de courbure.
C'est pourquoi, on réserve cette méthode quand on travaille pour une valeur particulière du paramètre.
![\begin{displaymath}\left\{ \begin{array}[c]{l} x=f(t)=x(t)\\ y=g(t)=y(t) \end{array} \right. \end{displaymath}](img331.png)


![\begin{displaymath} \Omega :\left\{ \begin{array}[c]{l} X=x-y^{\prime}\dfrac{... ...rime\prime} \end{array} \right\vert } \end{array} \right. \end{displaymath}](img334.png)
![\begin{displaymath}\left\{ \begin{array}[c]{l} x=x\\ y=f(x) \end{array} .\right. \end{displaymath}](img336.png)

Preuve. Il nous faut démontrer ces dernières formules, en particulier : et :  .
.
En paramétriques, on a :  et
et  donne :
donne : 
En polaires, ![]() donne :
donne :  et donc :
et donc : 
Et enfin, 
![]()
Remarque : Dans le cas d'une courbe définie en coordonnées polaire, lespoints d'inflexion vérifient
![]()
puisqu'en un point d'inflexion, la courbure est nulle.
Il s'agit ici du cas où on utilisera systématiquement les formules de calcul direct.
|
|
|
|
|
|
![]() qui permettent de calculer facilement
qui permettent de calculer facilement ![]() .
.

Exemple : On va chercher la courbure de la courbe d'équation polaire  au point
au point![]() correspondant à la valeur 0 du paramètre.
correspondant à la valeur 0 du paramètre. Ce qui nous donne
Ce qui nous donne ![]()
![]() et
et ![]() et enfin
et enfin 









 calculé au point considéré
calculé au point considéré




